





松下伺服驱动器正反转调节方法?松下伺服电机正反转设置方法?
一、手动调节方法
1. 打开伺服驱动器的面板,选择"PARM SET"选项,进入参数设定界面。
2. 在参数设定界面中,选择"INVERSE/COMPLEMENT"选项,进行正反转调节。
3. 将"INVERSE1"和"INVERSE2"的值设置为0或1,0表示正转,1表示反转。
4. 调节完成后,保存设置并退出参数设定界面。
二、自动调节方法
1. 进入伺服驱动器的面板,选择"INITIAL SET"选项,进入初始设定界面。
2. 在初始设定界面中,选择"INVERSE"选项,进行正反转自动调节。
3. 按照屏幕提示进行操作,自动调节过程中需要小心慢操作,从而得到更为精准的调节值。
4. 自动调节完成后,保存设置并退出初始设定界面。
需要注意的是,进行正反转调节时需要谨慎操作,避免不必要的损害。在手动调节时,应根据具体情况进行设置,避免将伺服驱动器调节至超过规范的参数范围;在自动调节时,应根据实际情况选择合适的自动调节方式,并注意调节过程中的小心慢操作。
总之,精准的正反转调节可以提高设备的性能和效率,但需要使用者进行正确严谨的操作,避免因操作不当引发不必要的故障。
1. 连接上电脑和伺服驱动器,打开参数配置工具软件。
2. 在软件中选择“功能设定”>“伺服驱动器”>“伺服配置”>“伺服驱动器参数”。
3. 找到“脉冲方向”或“单向脉冲”参数,根据实际需要设定正反转方向。
4. 将参数保存至伺服驱动器,即可完成正反转方向设置。
二、通过调用指令实现正反转控制
松下伺服电机的正反转控制指令可以通过PLC、PC或其他控制器进行调用实现。
1. PLC方式:
通过PLC编程,调用指令控制伺服电机的正反转方向。例如,使用M1指令控制伺服电机正向转动,使用M2指令控制伺服电机反向转动。
2. PC方式:
使用C++、VB等编程语言,通过调用伺服电机驱动程序库实现正反转控制。
三、通过修改I/O信号实现正反转控制
在某些情况下,通过修改I/O信号也可以实现松下伺服电机的正反转控制。
1. 可以通过更改伺服电机驱动器上的输入信号,如IN1、IN2等,来改变马达转向方向。
2. 具体的操作方法是更改IN1,IN2 输入信号的接线方式,使IN1 与IN2 更改接线顺序,即可实现马达正反转操作。
以上是松下伺服电机正反转设置的几种常用方法,使用时应根据实际需要选择合适的方法进行设置。同时,在进行设置前,建议仔细阅读设备说明书,熟悉伺服电机的相关参数和指令,以确保设置的正确性和安全性。
一、接线前的准备工作
在进行接线前,需要先确定伺服驱动器和伺服电机的型号和参数。另外,还需要将伺服驱动器和伺服电机安装到运动机械上,并将松下伺服驱动器的参数设置好。
二、伺服驱动器的接线方法
1.接好电源线
先将伺服驱动器的电源线按照正确的电压等级和颜色接上。一般来说,松下伺服驱动器的电源线颜色为蓝色和白色,其中蓝色为三相电源线,白色为零线和接地线。
2.接好编码器和电机线
将编码器和电机线按照正确的颜色和相序接好。在接线时,需要将编码器和电机的三根线(相位A/B/Z)分别连接到伺服驱动器的编码器端子上,并且需要确保连接的顺序准确无误。
3.设置定位信号线
在机械运动中,需要使用到定位信号。因此,在接线时,需要将伺服驱动器的定位信号线(一般为Z相)连接到编码器的定位信号线上。
4.接好IO信号线
将伺服驱动器的IO信号线与PLC、数控系统或手动开关相连接。需要特别注意的是,在接线时需要分清楚输入信号和输出信号的线路。输入信号的线路应该接到伺服驱动器的输入端子上,而输出信号的线路则需要连接到伺服驱动器的输出端子上。
5.检查接线是否正确
在接好所有线路后,需要进行检查以确保接线的正确性。检查的方法是通过伺服驱动器的LED指示灯观察电源是否正常,以及检查是否出现错误信息等问题。
三、接线注意点
1.接线前必须确认伺服驱动器和伺服电机的型号和参数,并确保安装和设置正确。
2.接线时需要严格按照颜色和相序进行接线,并先接好电源线,最后接IO信号线。
3.在接好所有线路后,需要进行检查以确保接线的正确性。无论是在LED指示灯还是错误信息的提示下,都需要及时排查问题和解决问题。
【结尾】
本文详细介绍了松下伺服驱动器的接线方法,包括接线前的准备工作、接线注意点和接线方法等。同时,本文还提供了可视化的接线图示,方便读者更好地理解和掌握。如果想要更深入地了解松下伺服驱动器,建议阅读相关技术资料和操作手册。
A5系列伺服驱动器控制回路接线方式
伺服驱动器控制回路的接线比较复杂,但是有较多的接线端口是可以不用的,根据实际工程要求,分别对待。下面以松下A5系列伺服驱动器为例,较全面分析控制回路的端口接线。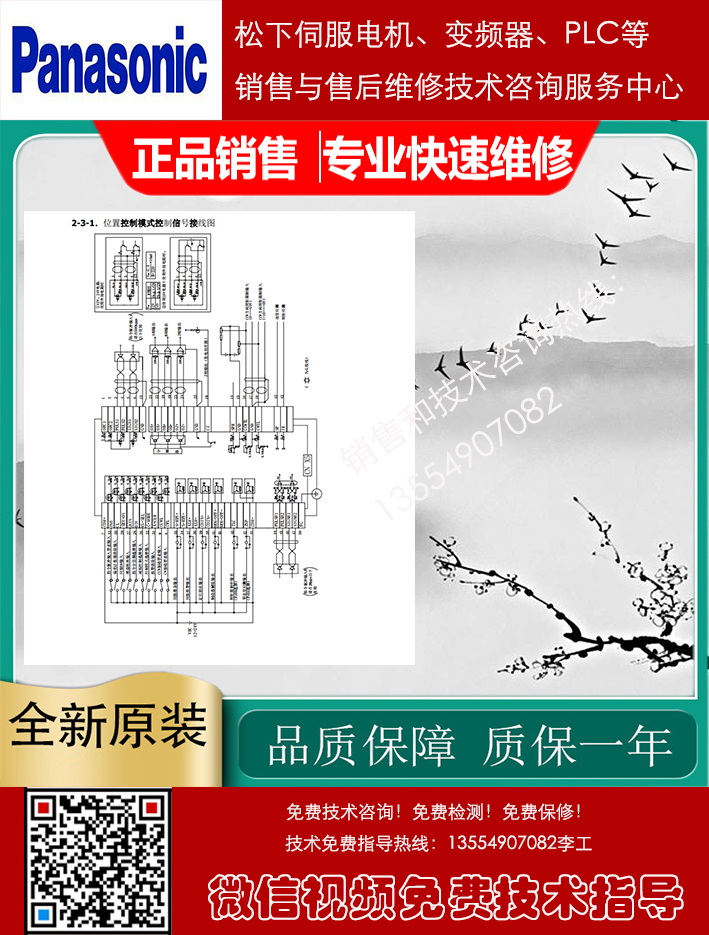
1、A5伺服驱动器的开关量输入、模拟量输入、脉冲输出回路及一些插接口:

▲ 源型输入输出
SI1~SI10为10个可编程(设置)的端口,可改变端口的定义。输入电流为毫安级(<30mA)。

模拟量信号输入端口有:AI1速度指令输入(0~±10V,一般用0~10V调速加开关量方向信号)、AI2正向转矩限制输入(0~+10V)、AI3反向转矩限制输入(0~-10V)为模拟量输入信号端子,后面两个为恒转矩控制用。电位器RV=2KΩ,功率为1/2W。
OA、OB、OZ为编码器反馈的脉冲数太高不能直接反馈给PLC,经过伺服驱动器转换分频后,输出到PLC的三相脉冲信号。并联终端电阻为330Ω,最大输出电流为20mA。这是上位机差分方式接收脉冲,还有一种上位机的接收方式为光耦接收,应串联一个150Ω的限流电阻。
CZ为集电极开路方式的Z相脉冲输出,给到PLC,做为原点回归的零点反馈信号。最大输出电压为30VDC,最大输出电流为50mA,一般取24VDC,10mA。

X1为USB连接端口,连接到PC机,为专用软件设置参数通道。
X2为通讯连接端口,如RS232\RS485等联网。
X3安全功能连接端口,如紧急开关的连接,一般不用。
X4为并行I/O输入输出连接端口,为主要控制端口。
X5为光栅尺连接端口,精密机床全闭环定位控制要用到。
X6为编码器输入连接端口,接收电机反馈信号。
2、A5伺服驱动器的指令脉冲输入、开关量输出、速度监控输出、转矩监控输出接口,如下图:
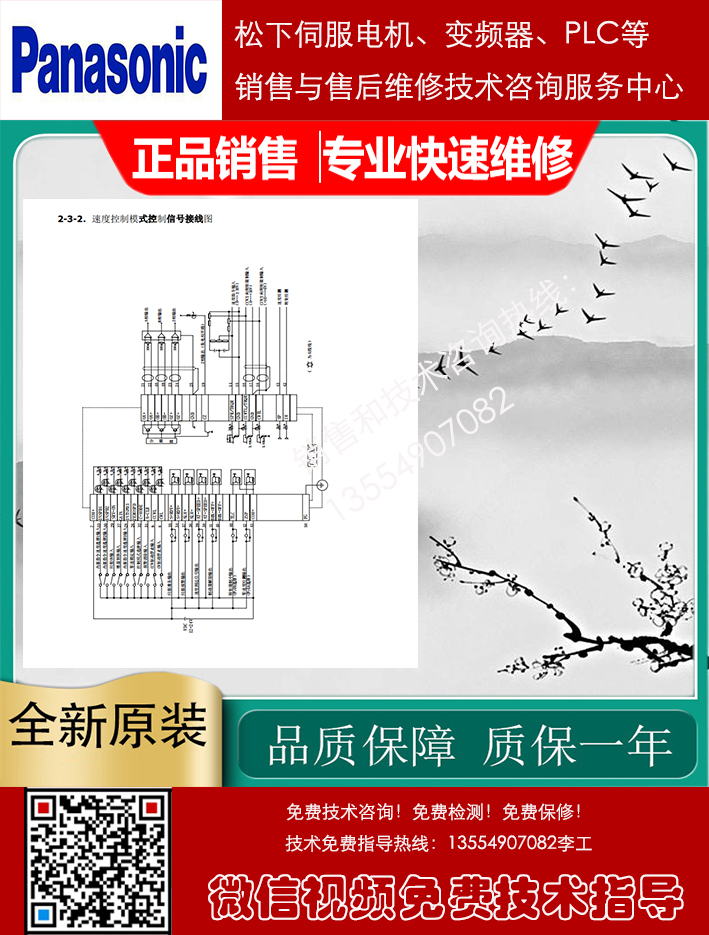

▲ 此图输出回路有误,
以产品说明书为准
指令脉冲输入由上位机(PLC、运动控制器等)输入,由5~30VDC电源驱动,电流10mA左右,有集电极开路方式输入(200KHZ)和差分电路方式输入(脉冲频率较高,达500KHZ,可由集电极开路方式电路接收)方式,还有一种高速差分电路输入方式(脉冲频率达4MHZ,接收也应由差分电路接收)。
开关量输出,由光电耦合器隔离,内外电路互不干扰,输出电流应小于50mA,外电路接继电器线圈时,并联一个反向二极管,用于线圈自感反向电动势续流。
输出端口和输入端口一样,有对应的参数设置,出厂定义值如下:

了解更多接线情况,请看第三篇,十张A5系列伺服驱动器与PLC接线图。



MINAS A5系列 A5Ⅱ系列通用型,脉冲型驱动器现货、PDF使用操作手册、选型手册、一级代理商、安装调试、维修、安装接线图、故障、技术参数资料、产品说明书,选型等,点击进官网:
咨询服务电话13554990546邓小姐(微信同号),技术咨询服务电话13554907082李工(微信同号) (点击电话直接拔打咨询)
|
MADHT1505 咨询服务电话13554907082李工 |
MSMD5AZG1U 20位增量式编码器/带引线插头 |
|
MADHT1507
|
MHMD022G1U 20位增量式编码器/带引线插头 (高惯量) 咨询服务电话13554907082李工 |
|
MBDHT2510
|
MHMD042G1U 20位增量式编码器/带引线插头 (高惯量) 咨询服务电话13554907082李工 |
|
MCDHT3520
|
MHMD082G1U 20位增量式编码器/带引线插头 (高惯量) 咨询服务电话13554907082李工 |
|
MDDHT3530
|
MDME102G1G 20位增量式编码器 咨询服务电话13554907082李工 |
|
MDDHT5540 咨询服务电话13554907082李工 |
MDME152G1G 20位增量式编码器 MSME102G1G 20位增量式编码器 MHME152G1G 20位增量式编码器 |
|
MEDHT7364
|
MDME202G1G 20位增量式编码器 MDME202G1H 20位增量式编码器/带制动器 MHME202G1G 20位增量式编码器 咨询服务电话13554907082李工 |
|
MFDHTA390
|
MDME302G1G 20位增量式编码器 MSME302G1G 20位增量式编码器 MHME302G1G 20位增量式编码器 咨询服务电话13554907082李工 |
|
MFDHTB3A2 咨询服务电话13554907082李工 |
MDME402G1G 20位增量式编码器 MSME402G1G 20位增量式编码器 MHME402G1G 20位增量式编码器 |


咨询服务电话13554990546邓小姐(微信同号),技术咨询服务电话13554907082李工(微信同号) (点击电话直接拔打咨询)
——★★★【承接维修单◆免费检测◆十五年代理销售服务更专业】★★★——
深圳市诚弘欣科技有限公司专业致力于伺服电机、驱动器、变频器等工控配件销售及维修的公司。
联系人:邓小姐
联系电话:0755-29613587
联系手机:13554990546 微信号
网址:http://www.chxsz.com www.oil-gift.com www.szsfwx.com QQ:184860417、1473293320
故障码+辅码=故障报警信息
11 0=控制电源欠压
12 0=母线电压过高
13 0=主电源欠压;
1=主电源不足电压保护(AC 断开检出
14 0=输出过电流
1=IPM 异常保护
15 0=电机或驱动器过热
16 0=过载
18 0=再生放电电阻过载;
1=再生 Tr 异常保护
21 0=编码器断线
1=编码器通信异常保护
23 0=编码通讯数据异常
24 0=位置偏差过大保护
1=速度偏差过大保护
25 0=反馈错误
26 0=过速度保护
1=第 2 过速度保护
27 0=指令脉冲输入频率异常保护
2=指令脉冲分倍频异常保护
28 0=脉冲再生界限保护
29 0=位置偏差计数器溢出保护
30 0=安全检出
33 0 =IF 重复分配异常 1
1= IF 重复分配异常 2
2 =IF 输入功能号码异常 1
3 =IF 输入功能号码异常 2
4= IF 输出功能号码异常 1
5 =IF 输出功能号码异常 2
6 =CL 分配异常
7 =INH 分类异常
34 0=电机可动范围设定异常保护
36 0~2= EEPROM 参数异常保护
37 0~2= EEPROM 代码异常保护
38 0=驱动禁止输入保护
39 0=模拟量输入 1 过大保护
1=模拟量输入 2 过大保护
2=模拟量输入 3 过大保护
40 0=绝对式编码器系统断电异常保护
41 0=绝对式编码器计数异常保护
42 0=绝对式编码器过速异常保护
43 0=初始化失败
44 0=绝对式编码器单周计数异常保护
45 0=绝对式编码器多周计数异常保护
47 0 =绝对式编码器状态异常保护
48 0=编码器 Z 相异常保护
49 0=编码器 CS 信号异常保护
50 0=外部光栅尺连线异常保护
1=外部光栅尺通信异常保护
51 0=外部光栅尺状态 0 异常保护
1=外部光栅尺状态 1 异常保护
2=外部光栅尺状态 2 异常保护
3=外部光栅尺状态 3 异常保护
4=外部光栅尺状态 4 异常保护
5=外部光栅尺状态 5 异常保护
55 0 =A 相连线异常保护
1=B 相连线异常保护
2=Z 相连线异常保护
87 0=强制警报输入保护
95 0~4=电机自动识别异常保护
---其他显示:(干扰,重新上电故障依旧,内部故障)

