





FANUC机器人故障代码解释及应对措施(SRVO-046)
SRVO–046 SVAL2 OVC alarm (Group:iAxis : j)
解释:这个警报发出是为了阻止马达由于计算出的伺服放大器的均方电流超 过允许值,以至于过热而损坏。
(措施 1):如有可能,应缓解该轴的操作。此外,如果负载和操作条件超过 额定值, 应进行变更,以便在额定值内使用。
(措施 2):确认控制装置的输入电压是否处在额定电压内,并确认控制装置 的变压器的电压设定是否正确。
(措施 3):确认该轴的制动器是否已经开启。
(措施 4):确认是否存在导致该轴的机械性负载增大的原因。
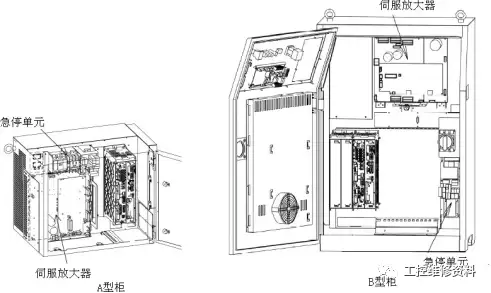
(措施 5):替换伺服放大器。
(措施 6):替换该轴的电机。
(措施 7):替换急停单元。
(措施 8):替换该轴的电机动力线(机器人连接电缆)。
(措施 9):替换该轴的电机动力线、制动器线(机器人机械部内部)。
参考:与 OVC/OHAL/HC 相关的内容
概述:本部分指出了在 OVC,OHAL,和 HC 警报之间的不同,并描述了每种 警报的目的。
警报检测部分:
每种警报的目的:
- HC 警报(高电流警报)如果高电流流过晶体管立刻就会导致控制电路的异常或噪音,晶体管和整流器二极管可能会被烧毁,或者马达的磁铁也有可能被消磁。HC 警报就是为了阻止这样的故障发生。
2. OVC 和OHAL 警报(过电流和过热报警)OVC 和OHAL 警报是有意预防 可能过热的情况发生,而这种现象会导致马达线圈烧毁以及使伺服放大器 晶体管和分体型再生电阻器损坏。
OHAL 报警根据内置的各种热动继电器测量各部位的温度,当超过额 定温度时,就会发生报警。
但是,仅仅依靠这种方式,还不能完全预防由于过热造成的电机绕组 烧坏和晶体管、再生放电电阻的损坏。
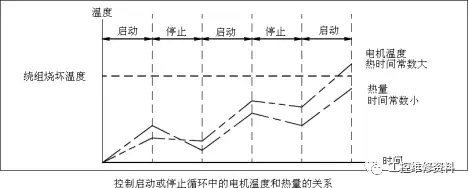
比如,当电机的驱动或停止剧烈时,由于电机的热时间常数和热的时 间常数根据各自的材质、结构和尺寸的不同而有差异,通常重量较大的电 机的热的时间常数也较大。
因此,如下图所示,当在短暂时间内反复启动或停止时,马达的温度 上升比热动继电器的温度更急剧,从而导致在热动继电器检测到不正常高 温之前, 马达被烧毁。
因此,为了消除上述缺陷而准备了报警,以便通过软件时刻监控流向电机的电流,由该值来推测电机的温度。
这就是 OVC 报警。采用这种方式时,可以非常准确地推测电机温度,因而可以消除上述现象。
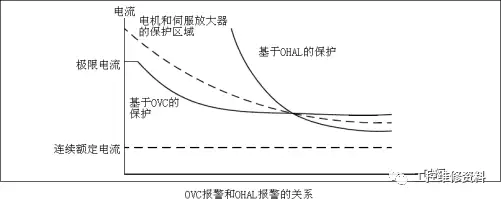
如上所述,机器人备有双重保护功能:针对短时间的过电流的保护有 OVC 报警来执行,长时间的保护则由 OHAL 报警来执行。其关系图如下图所示:
注意:
关于 OVC 报警,由于考虑到了上图所示的关系,因而绝对不要因为电机不热却有报警发生而改变参数并放低保护级别。
深圳市诚弘欣科技有限公司
24小时联系电话:
13554907082 李工

-
- 罗兰印刷机电机维修,罗兰印刷机马达维修,罗兰印刷机控制器维修,绕线断轴进水进油
- 海德堡印刷机电机维修,海德堡印刷机马达维修,海德堡印刷机控制器维修,绕线断轴进水
- 高宝印刷机电机维修,高宝印刷机马达维修,高宝印刷机控制器维修,绕线断轴进水
- 三菱印刷机电机维修,印刷机马达维修,印刷机控制器维修,绕线断轴进水
- 小森印刷机电机维修,印刷机马达维修,印刷机控制器维修,绕线断轴进水
- 良明印刷机电机维修,印刷机马达维修,印刷机控制器维修,绕线断轴进水
- 富士印刷机电机维修,印刷机马达维修,印刷机控制器维修,绕线断轴进水
- 景德镇中景印刷机伺服电机维修,伺服马达维修,伺服驱动器控制器维修,绕线断轴进水
- 意高发柔性印刷机伺服电机维修,伺服马达维修,伺服驱动器控制器维修,绕线断轴进水
- 北人印刷机伺服电机维修,伺服马达维修,伺服驱动器控制器维修,绕线断轴进水
- 光华印刷机伺服电机维修,伺服马达维修,伺服驱动器控制器维修,绕线断轴进水
- 华光印刷机伺服电机维修,伺服马达维修,伺服驱动器控制器维修,绕线断轴进水
- 铭泰印刷机伺服电机维修,伺服马达维修,伺服驱动器控制器维修,绕线断轴进水
- 振邦印刷机伺服电机维修,伺服马达维修,伺服驱动器控制器维修,绕线断轴进水
- 华博制袋机伺服电机维修,伺服马达维修,伺服驱动器控制器维修,绕线断轴进水
- 美国MAG、美国哈挺乔堡加工中心伺服电机销售,MAG、美国哈挺加工中心控制器维修
- 意大利菲迪亚加工中心伺服电机销售,意大利菲迪亚、西班牙达诺巴特加工中心控制器维修
- 美国哈斯HASS加工中心伺服电机销售,美国哈斯加工中心驱动器控制器维修
- 韩国斗山、韩国现代、韩国三星加工中心伺服电机销售,加工中心驱动器控制器维修
- 日本森精机加工中心FANUC伺服电机销售,森精机FANUC加工中心控制器销售维修
- 日本大偎OKUMA加工中心伺服电机销售,日本大偎加工中心控制器销售维修
- 日本马扎克mazak加工中心伺服电机销售,马扎克mazak加工中心控制器销售维修
- BROTHER加工中心伺服电机销售维修,兄弟加工中心维修 ,控制器维修故障查询
- 日本丰田工机(TOYODA)加工中心伺服电机销售,丰田工机加工中心控制器维修
- 台湾丽驰、台湾大侨、大立加工中心伺服电机,台湾丽驰、大侨、大立驱动器控制器维修
- 台湾永进、台湾东台、台湾台中精机、快捷、高峰加工中心伺服电机,驱动器控制器维修
- 沈阳、宝鸡、云南、大连加工中心伺服电机,沈阳、宝鸡、云南、大连驱动器控制器维修
- 台湾友佳、台湾丽伟、台湾艾格玛、台湾绮发加工中心伺服电机,驱动器控制器维修
- 瑞士米克朗、瑞士宝美、瑞士斯特拉格、瑞士利吉特、瑞士威力铭加工中心电机销售维修
- 德国DMG、德国斯宾纳、德国斯塔玛加工中心伺服电机控制器销售维修
- 德国哈默、德国奥美特、德国巨浪加工中心伺服电机控制器销售维修
- 日本牧野Makino加工中心伺服电机销售,牧野Makino加工中心控制器销售维修
- 加工中心行业配件销售维修
- 锡膏印刷机安川伺服电机销售维修,锡膏印刷机安川驱动器松下控制器维修
- 端子机三洋伺服电机销售维修,端子机安川驱动器松下控制器维修
- 绕线机安川伺服电机销售维修,绕线机安川驱动器松下控制器维修
- 三星贴片机伺服电机销售维修,三星贴片机驱动器控制器维修
- 点胶机松下伺服电机销售维修,点胶机安川驱动器松下控制器维修
- AOI光学检测设备松下伺服电机销售维修,AOI检测设备安川驱动器松下控制器维修
- JUKI贴片机伺服电机销售维修,JUKI贴片机驱动器控制器维修
- 松下贴片机伺服电机销售维修,松下贴片机驱动器控制器维修
- 富士贴片机安川伺服电机销售维修,富士贴片机安川驱动器控制器维修
- PCB钻孔机三洋伺服电机销售维修,PCB制板机安川驱动器三洋控制器维修
- SMT/AI等电子行业配件销售维修
- 住友注塑机伺服电机销售维修,住友注塑机控制器维修,住友注塑机显示屏维修
- TOYO东洋注塑机伺服电机销售维修,TOYO东洋注塑机控制器维修
- niigata新泻注塑机伺服电机销售维修,niigata新泻注塑机控制器维修
- nissei日精注塑机伺服电机销售维修,nissei日精注塑机控制器维修
- YUshin友信机械手伺服电机销售维修,YUshin有信机械手控制器维修
- STAR机械手伺服电机销售维修,STAR机械手控制器维修
- 海天注塑机科比伺服电机销售维修,海天注塑机科比变频器驱动器控制器维修
- 注塑及机械手行业配件销售维修
- 雕刻机松下三菱伺服电机销售维修,精雕机松下驱动器三菱控制器维修
- 雕铣机安川三洋伺服电机销售维修,精雕机雕铣机安川驱动器三洋控制器维修
- 水刀安川伺服电机销售维修,水刀安川驱动器控制器维修
- 水刀、精雕机配件销售维修
- 沙迪克慢走丝(Sodick)伺服电机销售维修,沙迪克(Sodick)维修
- 三菱慢走丝伺服电机销售维修,三菱慢走丝驱动器控制器维修
- 西部慢走丝伺服电机销售维修,西部慢走丝驱动器控制器维修
- 牧野慢走丝伺服电机销售维修,牧野慢走丝驱动器控制器维修
- 庆鸿慢走丝伺服电机销售维修,庆鸿慢走丝驱动器控制器维修
- FANUC慢走丝伺服电机销售维修,FANUC慢走丝驱动器控制器维修
- 阿奇夏米尔慢走丝伺服电机销售维修,阿奇夏米尔慢走丝驱动器控制器维修
- 苏三光慢走丝伺服电机销售维修,苏三光慢走丝驱动器控制器维修
- 慢走丝 火花机配件销售维修
- 玻璃切割机安川伺服电机销售,安川伺服驱动器维修,玻璃切割机安川伺服电机驱动器维修
- 激光切割机配件销售维修
- 激光切割机安川伺服电机销售,安川伺服驱动器维修
- 剪板折弯机配件销售维修
- 弹簧机配件销售维修
- 特种专用设备配件销售维修
- 数控开料机、侧孔机、封边,木工加工中心等木工设备伺服电机驱动器销售维修
- 织布机、印花机、绣花机、针织机等服装设备伺服电机驱动器销售维修
- 印刷行业电机伺服控制器维修
-
- 东芝变频器销售,东芝伺服电机维修。东荣伺服驱动器维修。东芝电机维修
- 欧姆龙伺服电机销售,OMRON欧姆龙伺服马达维修,欧姆龙变频器销售,PLC销售
- 信浓SINANO伺服电机维修。信浓伺服驱动器维修,信浓SINANO直流电机维修
- (HITACHI)日立伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
- (NIKKI DENSO)日机电装伺服驱动器、伺服电机、步进电机销售与售后咨询
- (SHINKO)神钢伺服电机伺服驱动器、伺服电机、步进电机销售与售后咨询维修
- 大金Daikin柱塞泵、伺服电机油泵、变量泵、组合变量柱塞泵、定位液压马达
- (ORIENTAL/VEXTA)东方伺服驱动器、伺服电机、步进电机销售与售后咨询
- (YOKOGAWA)横河伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
- (YAMAHA)雅马哈伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
- (ESTIC)艾斯迪克伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
- (KEYENCE)基恩士伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
- (YAMATAKE)山武伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
- 多摩川伺服电机销售维修
- (DENSO)日本电装伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
-
- AMK伺服电机维修。AMK伺服驱动器维修,AMK直流电机维修
- 科比KEB伺服驱动器、伺服电机、变频器销售与售后咨询维修服务中心
- (斯德博)STOBER伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
- (BERGER LAHR)百格拉伺服驱动器、伺服电机销售与售后咨询维修服务中心
- ELAU伺服驱动器、伺服电机、步进电机销售与售后咨询维修服务中心
- GROSCHOPP直流电机、伺服电机、步进电机、减速机销售与售后咨询维修服务中心
- (Faulhaber)冯哈伯空心杯电机、直流电机销售与售后咨询维修服务中心
- Dunker德恩科伺服电机、直流电机、无刷电机销售与售后咨询维修服务中心
- (Beckhoff)倍福伺服驱动器、伺服电机、变频器销售与售后咨询维修服务中心
- (Danaher Motion)丹纳赫伺服驱动器、伺服电机销售与售后维修服务中心
- (ELECTRO-CRAFT)瑞恩伺服电机、伺服驱动器销售与售后咨询维修服务中心
- (BPACIFIC SCIENTIFIC)太平洋伺服电机、伺服驱动器销售与维修
- (parker)帕光/派克伺服电机、伺服驱动器销售与售后咨询维修服务中心
- (kollmorgen)科尔摩根伺服驱动器、伺服电机销售与售后咨询维修服务中心
- QMC伺服电机、伺服驱动器、步进电机销售与售后咨询维修服务中心
- ORMEC伺服电机、伺服驱动器、步进电机销售与售后咨询维修服务中心
- (Honev well)霍尼韦尔伺服电机、伺服驱动器销售与售后咨询维修服务中心
- (MAXON)麦克森伺服电机、空心杯电机、直流电机销售与售后咨询维修服务中心
- EMERSON艾默生伺服电机、伺服驱动器、步进电机销售与售后咨询维修服务中心

-
ꁸ 回到顶部
-
ꂅ 13554907082
-
ꁗ QQ客服
-
ꀥ 微信二维码
